Contrôle Runtime dans la Console Miravo
Pilotez le moteur runtime, gérez les adaptateurs MQTT, OPC UA et Modbus, injectez des défauts et réinitialisez l'environnement actif.
La route /control est Mission Control pour l'environnement en cours.
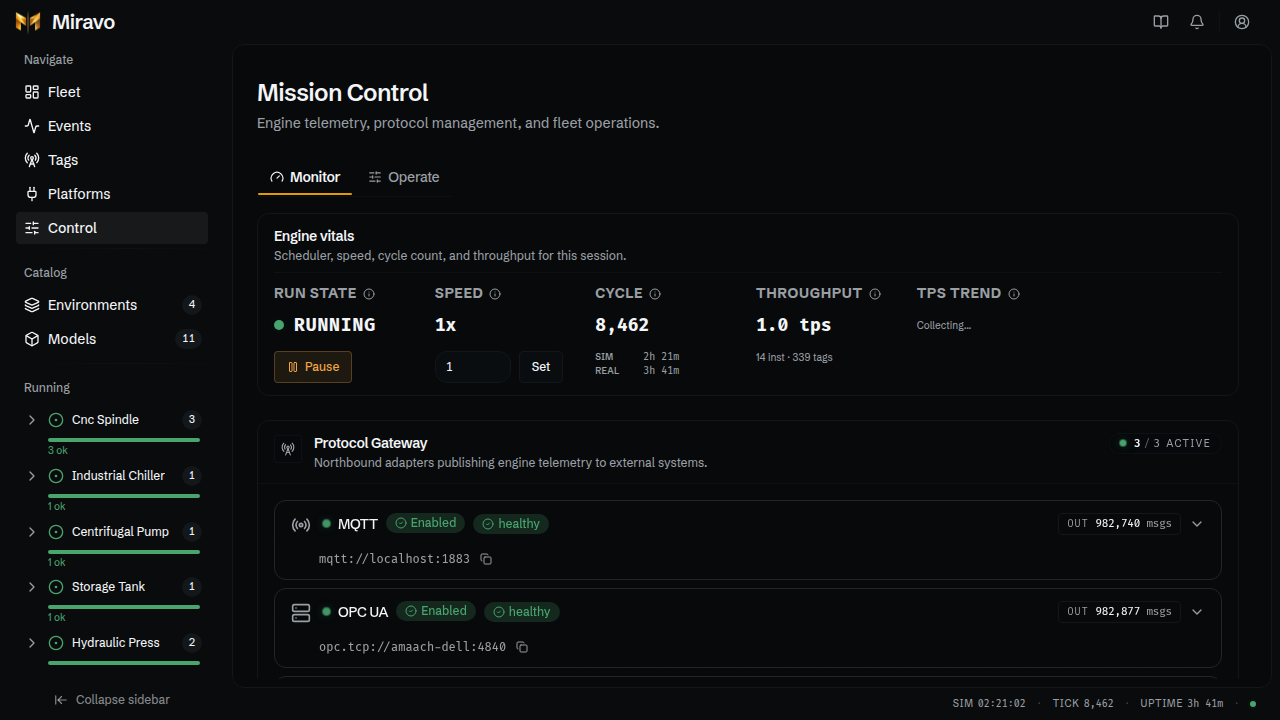
Monitor
L'onglet Monitor affiche les vitaux moteur et l'état de la passerelle protocole.
Les vitaux moteur incluent:
- état d'exécution
- multiplicateur de vitesse
- numéro de cycle
- temps simulé
- uptime réel
- débit de tags
- tendance de débit
La passerelle protocole affiche chaque adaptateur enregistré, dont MQTT, OPC UA et Modbus TCP quand ils sont activés.
Les cartes adaptateur affichent:
- état d'activation
- état de santé
- nombre de messages publiés
- URL de connexion
- métriques propres à l'adaptateur
Operate
L'onglet Operate contient les stations d'action runtime:
- opérations de flotte
- injection de défaut
- actions d'instance
- réinitialisation d'environnement
Utilisez les actions d'instance pour supprimer ou sortir de quarantaine les instances sélectionnées.
Utilisez l'injection de défaut pour déclencher ou effacer les défauts pris en charge par les modèles.
Reset
L'action reset supprime les instances en cours et les environnements chargés. Elle peut aussi effacer l'état persisté.
Reset modifie l'état runtime
Reset est une action opérateur. Utilisez-la seulement quand l'environnement courant doit être déchargé.
Was this page useful?
Catalogue dans la Console Miravo
Parcourez les environnements et modèles d'actifs intégrés, inspectez le YAML source, lancez du contenu et exportez des fichiers plateforme.
Opérations plateforme dans la Console Miravo
Enregistrez des cibles plateforme, appliquez des templates, nettoyez les ressources gérées, inspectez les exports Litmus Edge et auditez chaque run.